全自動塗膠機器人的應用
全自動塗膠機器人的應用
金屬蓋塗膠的全自動化
降低投入·提高生產性
解決勞動力短缺
品質提升
高速高精度加工
機器視覺
工藝介紹
自2007年【限塑令】實施以來�����,塑料包裝受到了極大的限製。隨之���,以啤酒罐�����、茶葉罐���、機油罐為代表的各類金屬罐製品愈發增多���,金屬包裝開始迎來飛速發展的時期�����,
金屬製罐分為罐蓋和罐身兩部分�,罐蓋經過金屬板原料的裁片�、衝壓����、卷邊和塗膠等工藝製成。目前�����,由於人工成本不斷上揚����,“機器換人”的需求迫在眉睫�,而如何以更低的成本導入機器�,又能達到柔�����、準����、快三個特點����,是金屬包裝行業亟需解決的課題。
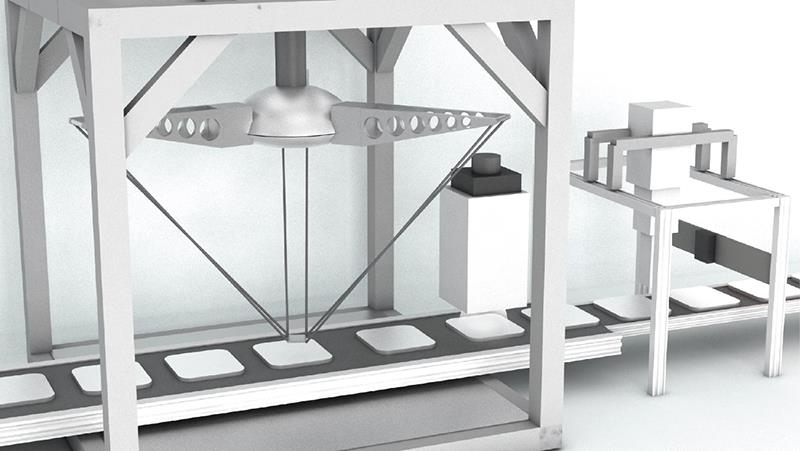
金屬蓋塗膠機器人設備
課題
1��、受到機械誤差�、機器人誤差���、出膠頭歪斜幅度和工藝誤差等多因素影響����,塗膠軌跡精度難以達到要求。
2�����、購置成套並聯機器人成本高昂���,且示教過程繁瑣�,依賴熟練技術人員的感性與經驗。
解決方案
1��、優化檢測算法����,精準定位起點坐標���,實現高精度軌跡控製
金屬蓋是衝壓成型�����,工藝精度±0.05mm�����,機器人軌跡跟隨的精度在機器人算法的優化下可達0.01mm�����,已達到要求。因此���,四周邊緣的塗膠可采用固定形態軌跡�,根據視覺定位的起點位置和傾斜角度進行整體調整。
因(yin)為(wei)矩(ju)形(xing)蓋(gai)的(de)傾(qing)斜(xie)角(jiao)度(du)很(hen)容(rong)易(yi)獲(huo)得(de)��,所(suo)以(yi)定(ding)位(wei)的(de)關(guan)鍵(jian)就(jiu)是(shi)起(qi)點(dian)的(de)檢(jian)測(ce)。經(jing)過(guo)數(shu)十(shi)次(ci)實(shi)驗(yan)發(fa)現(xian)�����,最(zui)契(qi)合(he)機(ji)器(qi)人(ren)動(dong)作(zuo)方(fang)式(shi)的(de)軌(gui)跡(ji)起(qi)點(dian)���,是(shi)在(zai)右(you)上(shang)角(jiao)弧(hu)邊(bian)與(yu)直(zhi)邊(bian)交(jiao)點(dian)向(xiang)蓋(gai)內(nei)側(ce)方(fang)向(xiang)的(de)位(wei)置(zhi)上(shang)。

而由於實際情況下每台設備的機械誤差�����、機器人誤差��、出chu膠jiao頭tou歪wai斜xie幅fu度du和he工gong藝yi誤wu差cha綜zong合he起qi來lai都dou是shi不bu同tong的de����,因yin此ci起qi點dian位wei置zhi依yi然ran會hui存cun在zai變bian化hua���,需xu要yao進jin行xing微wei調tiao。我wo們men通tong過guo優you化hua檢jian測ce算suan法fa��,使shi設she備bei能neng夠gou精jing準zhun量liang化hua起qi點dian坐zuo標biao����,簡jian化hua軌gui跡ji的de微wei調tiao�����,降jiang低di操cao作zuo難nan度du�,如ru此ci一yi來lai�����,即ji使shi是shi無wu經jing驗yan的de操cao作zuo人ren員yuan����,亦yi可ke將jiang軌gui跡ji精jing度du控kong製zhi在zai±0.2mm以內。
2���、借助EtherCAT通信指令控製功能����,實現新品的全自動示教
首先���,歐姆龍僅通過控製器+伺服的方式�,實現了塗膠的運動控製�����,僅需簡單搭建機械結構即可�����,無需耗費大量費用購置並聯機器人。
其次�,PLC通過EtherCAT通信發送“場景複製”指令給視覺�,視覺會在指定位置以模版場景為藍本新增一個新場景���,模版場景中有IF分支用於程序運行模式和示教模式的切換。
然後��,繼續通過EtherCAT通信的數據寫入指令���,將長寬尺寸等必要數據寫入視覺新場景的指定單元存儲起來�,留作測量區域和限值範圍的自動設定參照。
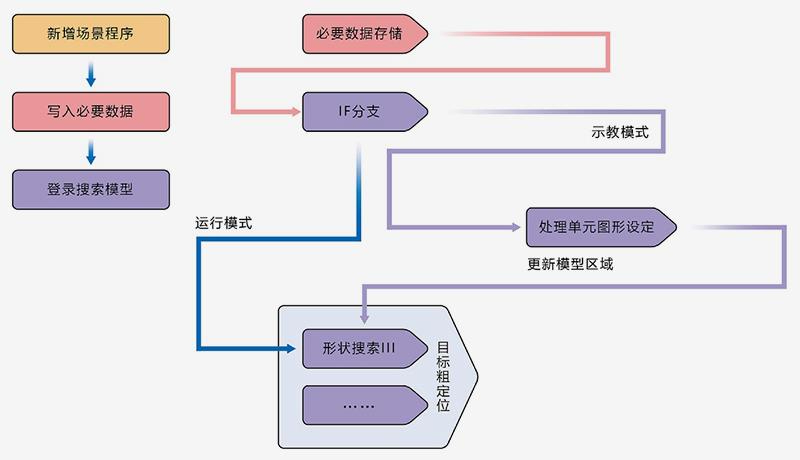 最(zui)後(hou)��,再(zai)通(tong)過(guo)通(tong)信(xin)指(zhi)令(ling)控(kong)製(zhi)視(shi)覺(jiao)執(zhi)行(xing)示(shi)教(jiao)���,也(ye)就(jiu)是(shi)切(qie)換(huan)分(fen)支(zhi)後(hou)觸(chu)發(fa)執(zhi)行(xing)測(ce)量(liang)��,新(xin)場(chang)景(jing)程(cheng)序(xu)就(jiu)會(hui)以(yi)示(shi)教(jiao)模(mo)式(shi)運(yun)行(xing)�,此(ci)時(shi)示(shi)教(jiao)分(fen)支(zhi)內(nei)的(de)處(chu)理(li)單(dan)元(yuan)圖(tu)形(xing)設(she)定(ding)就(jiu)可(ke)以(yi)刷(shua)新(xin)形(xing)狀(zhuang)搜(sou)索(suo)Ⅲ的模型區域實現當前圖像下的模型登錄��,新產品的測量程序也就示教完成了。
最(zui)後(hou)��,再(zai)通(tong)過(guo)通(tong)信(xin)指(zhi)令(ling)控(kong)製(zhi)視(shi)覺(jiao)執(zhi)行(xing)示(shi)教(jiao)���,也(ye)就(jiu)是(shi)切(qie)換(huan)分(fen)支(zhi)後(hou)觸(chu)發(fa)執(zhi)行(xing)測(ce)量(liang)��,新(xin)場(chang)景(jing)程(cheng)序(xu)就(jiu)會(hui)以(yi)示(shi)教(jiao)模(mo)式(shi)運(yun)行(xing)�,此(ci)時(shi)示(shi)教(jiao)分(fen)支(zhi)內(nei)的(de)處(chu)理(li)單(dan)元(yuan)圖(tu)形(xing)設(she)定(ding)就(jiu)可(ke)以(yi)刷(shua)新(xin)形(xing)狀(zhuang)搜(sou)索(suo)Ⅲ的模型區域實現當前圖像下的模型登錄��,新產品的測量程序也就示教完成了。
控製係統
■ 機械自動化控製器 NJ / NX係列
■ AC伺服係統 1S係列
■ 圖像處理係統 FH係列